.gif)
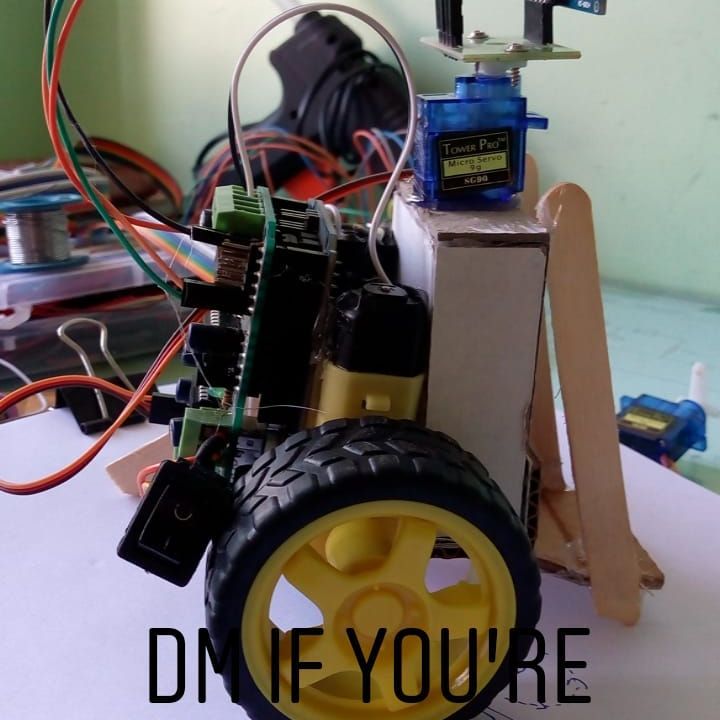
Obstacle Avoiding Robot
Situation
As I delved into Arduino's realm, I unearthed the seamless integration between the development board and its dedicated shield. A YouTube tutorial featuring an "Obstacle Avoiding Robot" project caught my eye and kindled a desire to create one for both my collection and experiential growth.
Task
First, I figured out the three main Problem for making of this Project
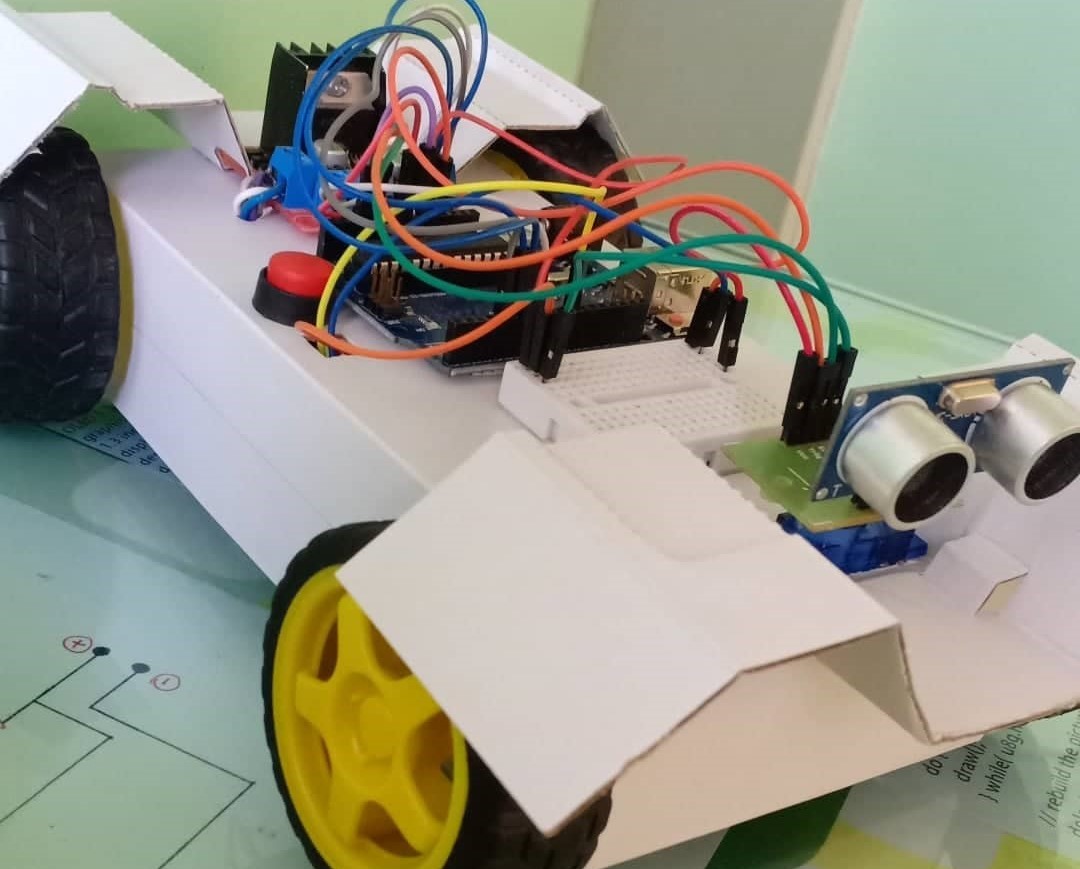
- 1.Sensor Calibration: Precise calibration of Arduino shield and Ultrasonic sensor. Ensuring accurate distance measurement for obstacle detection.
- 2.Alignment Setting: Configuring the robot's alignment to achieve specific turning degrees. Calibrating the motor control to ensure consistent and accurate turns.
- 3.Solving Battery Issue: Implementing a suitable voltage regulation or power distribution system.
Result
I successfully created an Obstacle Avoiding Robot that functions impeccably. The most significant challenge during this project was achieving precise calibration, aligning components effectively, and resolving the battery dilemma. This was due to the disparity between Arduino's operational voltage of 5.0v and the 12.0v required by the DC motors.
Technologies:
- - Microcontroller Programming
- - Circuit Design and Assembly
- - Problem Solving
- - Logic Implementation
- - Sensor Integration
Two ways To control DC Motor with Arduino
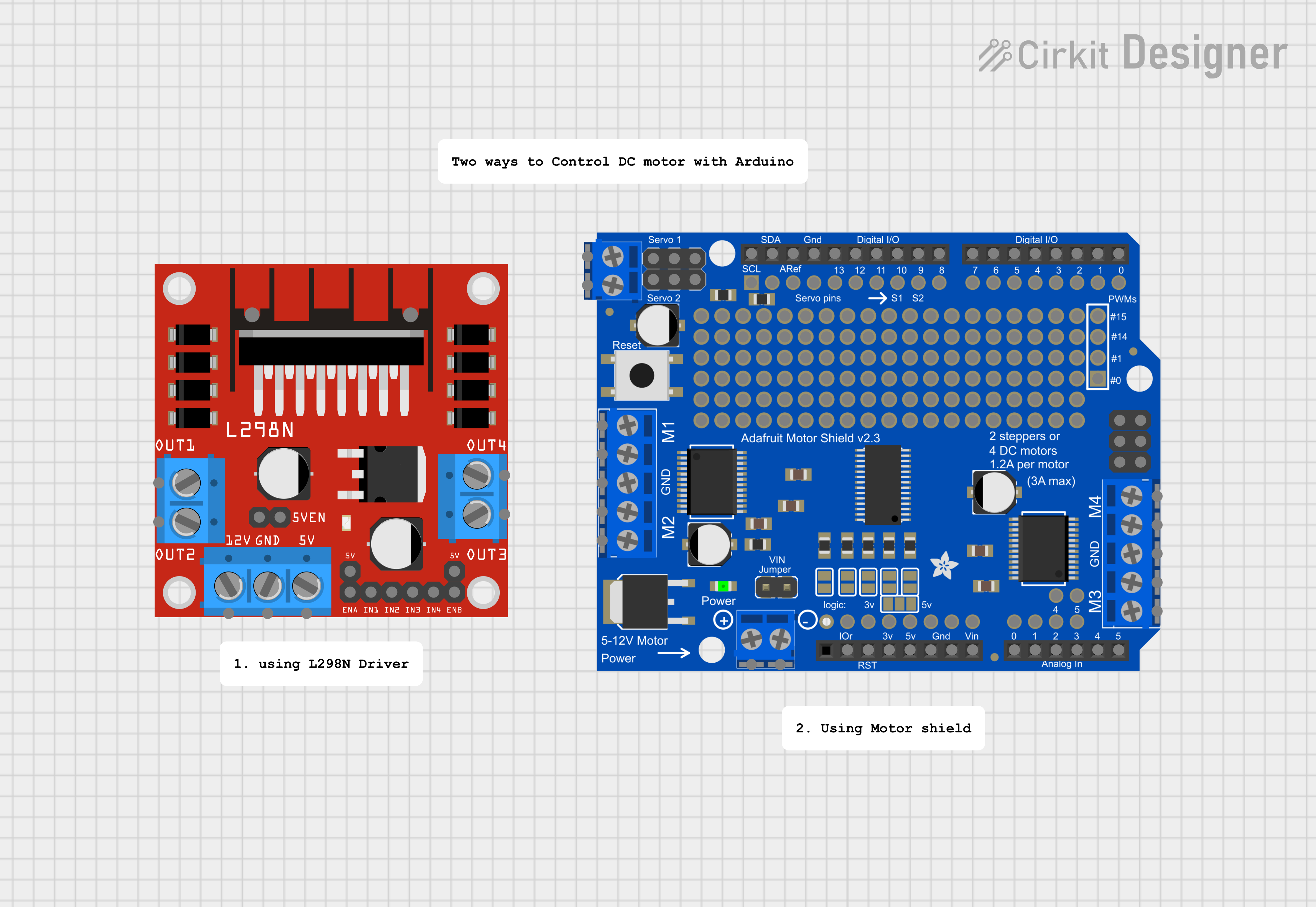
using L298N
using Arduino shield